
ROBOGUIDE案例1——搬运
#学习笔记 #软件学习 #ROBOGUIDE #案例学习
主要内容
通过ROBOGUIDE来实现对一个物体夹取并放到另一个位置上的过程的模拟,需要进行设定的内容有:
- 机器人相关设置
- 工件Part的设定
- 工装Fixture的设定
- 夹取过程的程序编写
- 基于仿真软件的示教
机器人以及手爪的设置
机器人管线设置
该案例的机器人与大楼里的ER-4iA不同,这次采用的是R2000iC/165F机器人
选择R2000iC/165F机器人,handling仿真,暂不设置手爪
卡在这个页面并不是软件卡死,而是需要用户在虚拟示教器上进行
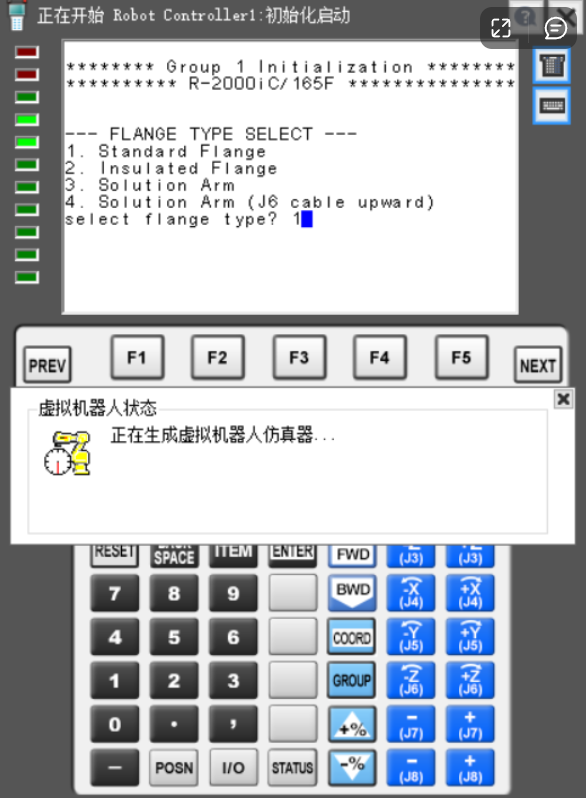
选择1即可
设置好记得在右键属性上面锁定机器人的坐标,锁定后的坐标轴显示为红色。然后右键保存管线把机器人的预设进行保存。
机器人手爪的设置
采用的手爪模型为36005f-200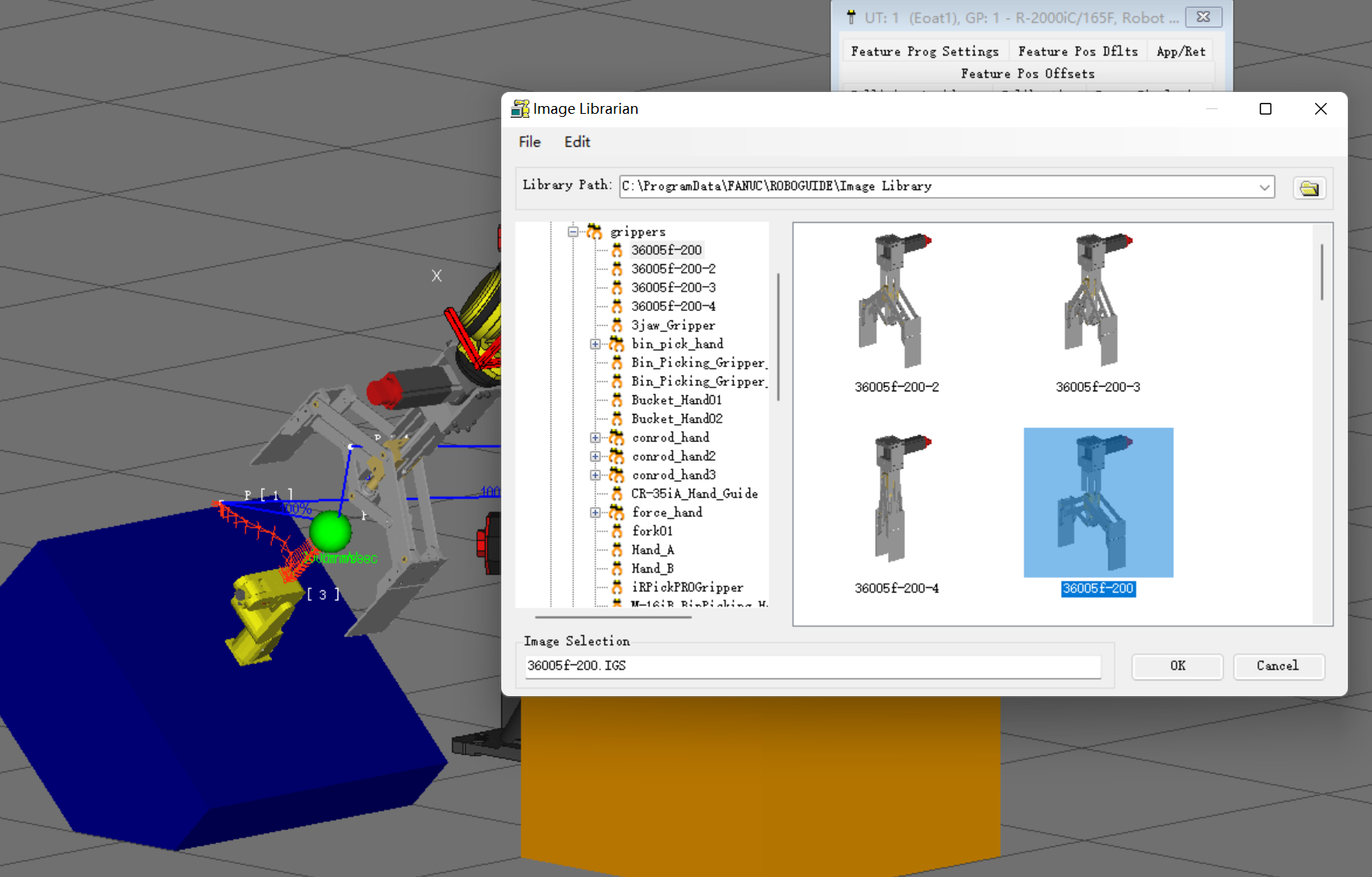
Location的设置为(0,0,0,270,0,0),设置好记得锁定Location的值
为了记录方便,括号内的数字分别代表着XYZWPR坐标的值
下一步设置工具坐标系的中心点TCP,在机器人仿真当中有两种设置TCP的方式:
- 直接输入:在属性当中点击UTOOL,把Z轴的值更改为850
- 拖动选择:在点击UTOOL的时候,夹爪上会出现一个绿色的点,拖动即可调整TCP的位置,UTOOL选项卡当中选择”Use Current Triad Location”更新TCP的位置
工件Part与工装Fixture的设置
工件的设置
下一步需要对工件进行设定了,在这个案例当中我们的机器人夹取的工件为一个小机器人,将其命名为”LittleRobot Part”。
添加工件并选择好模型,模型的位置在C:\ProgramData\FANUC\ROBOGUIDE\Sample Workcells\HandlingPRO\Workcell Example\Irmate200i-3d.csb,将三个轴的比例Scale更改为0.5。
工装的设置
本案例有两个工装,一个是把工件拿起来的工装,还有一个是把工件放下的工装
先设置把工件拿起来的工装,添加一个工装,采用长方体(Box),命名为Pick Fixture
- Location X1500 Y0 Z500 W315 P0 R0
- Scale X1000 Y1000 Z500
再将刚刚设置好的小机器人工件关联到工装,在Part选项卡当中把小机器人选上
在仿真选项卡中选择Allow part to be picked,让机器人能在这个工装上面拾取工件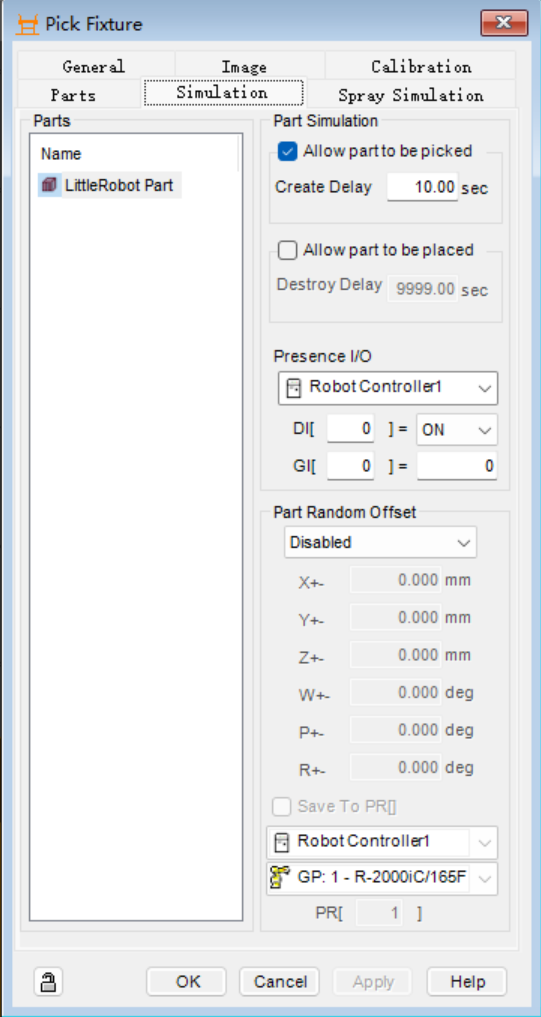
同样再设置放置工件的工装
也是长方体工装,命名为Place Fixture,更改其参数为: - Location X850 Y1500 Z750 W0 P0 R0
- Scale X1000 Y1000 Z750
工件选上机器人工件,仿真选择允许放置工件,延迟时间20s,类似上一个工装,然后取消Visible at Run Time开始执行时显示。
程序的编写与调试
下一步就要进行编程了,但是在进行编程之前还需要设置一个东西,就是手爪对工件的操作
手爪夹取与放下的设置
先设置一个手爪闭合的CAD文件,由于[[ROBOGUIDE场景搭建与工具设置#机器人末端夹取工具的添加]],在ROBOGUIDE当中手爪张开与手抓闭合是两个CAD文件,手爪闭合的CAD文件选择模型库当中的36005f-200-4,设置结束后可以点击Open与Close可以实现手爪的张开与闭合。
打开手爪的属性,选择工件选项卡选中小机器人工件,这个时候就会发现一个小机器人工件出现在手爪的位置上,这时需要对工件在手爪当中的位置进行调整,调整的方式有两种:
- 勾选”编辑工件偏移“Edit Part Offset,这时工件会出现坐标系,拖动坐标轴进行平移旋转操作可以调整工件偏移
- 勾选”编辑工件偏移“Edit Part Offset,输入XYZWPR的坐标值调整
本案例当中输入的偏移值为(0,-1170,-45,225,-85,45)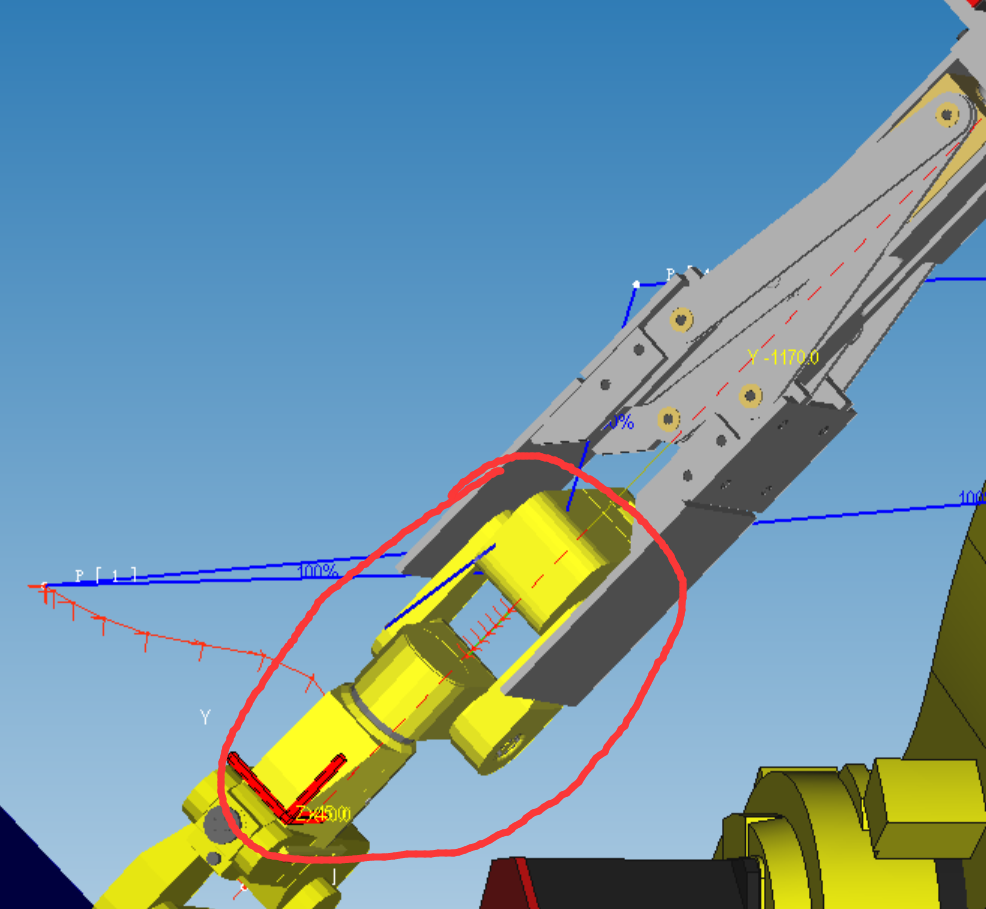
这个时候就可以看到手爪夹住工件的情形了
机器人示教
下面进行程序的编写,该案例的编程主要分两种
- 创建ROBOGUIDE仿真程序,用来实现工件的夹取与放置
- 创建TP程序,用虚拟示教器对机器人的路径点进行示教
创建仿真程序
在”程序“中创建仿真程序,命名为Pick,在指令中选择Pickup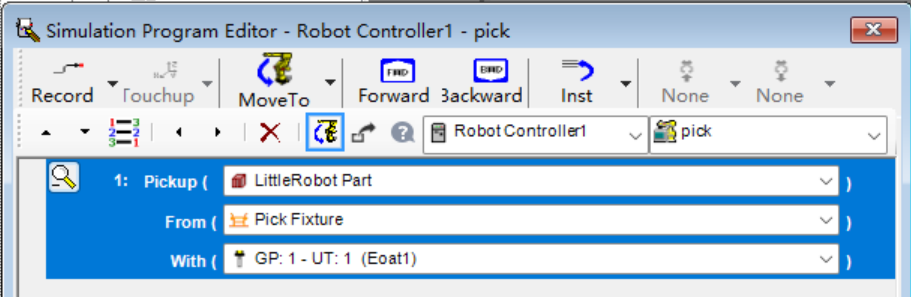
同样再创建一个仿真程序命名为Drop,指令中选择Drop,同样进行设置
创建TP程序
创建TP程序后会出现示教器,可以通过示教器的方式进行程序的创建,TP程序命名为Main
1 | 1:J P[1] 100%CNT100 ; |
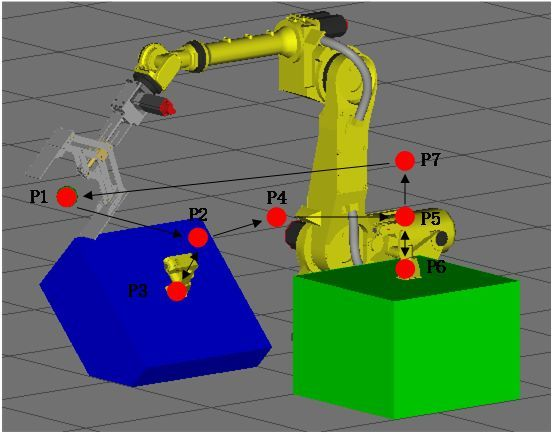
以这个路径进行示教,当然作为仿真程序,示教不见得非得按照手动移动来进行,可以拖动工具坐标轴来示教,巧用快捷键[[ROBOGUIDE快捷键汇总]]
总结
一个简单的搬运案例,涉及到以下几个部分:
- 机器人配置
- 手爪添加与设置
- 工装与工件的设置
- 夹取过程的仿真程序
之后的案例应该不会写这么多了~




