
ROBOGUIDE案例2——码垛
#学习笔记 #软件学习 #案例学习
主要内容
在ROBOGUIDE当中创建码垛仿真模型,主要涉及的内容有
- 码垛仿真的机器人以及吸盘的创建与设置
- 码垛仿真涉及到的Fixture
- 搬运货物Unit Loads的设置
- 厚纸板的设置
码垛机器人设置
机器人设置
整个设置类似于[[ROBOGUIDE案例1——搬运]],第一步选择进程的时候选择PalletPRO码垛工具,机器人选择H628的M-410iB/140H,其他保持默认
吸盘设置
这个案例用的是吸盘而不是夹爪
机器人的工具槽位只有一个了,双击进行设置,选择”码垛“,将手抓类型改为吸附(双重)Vaccum Double
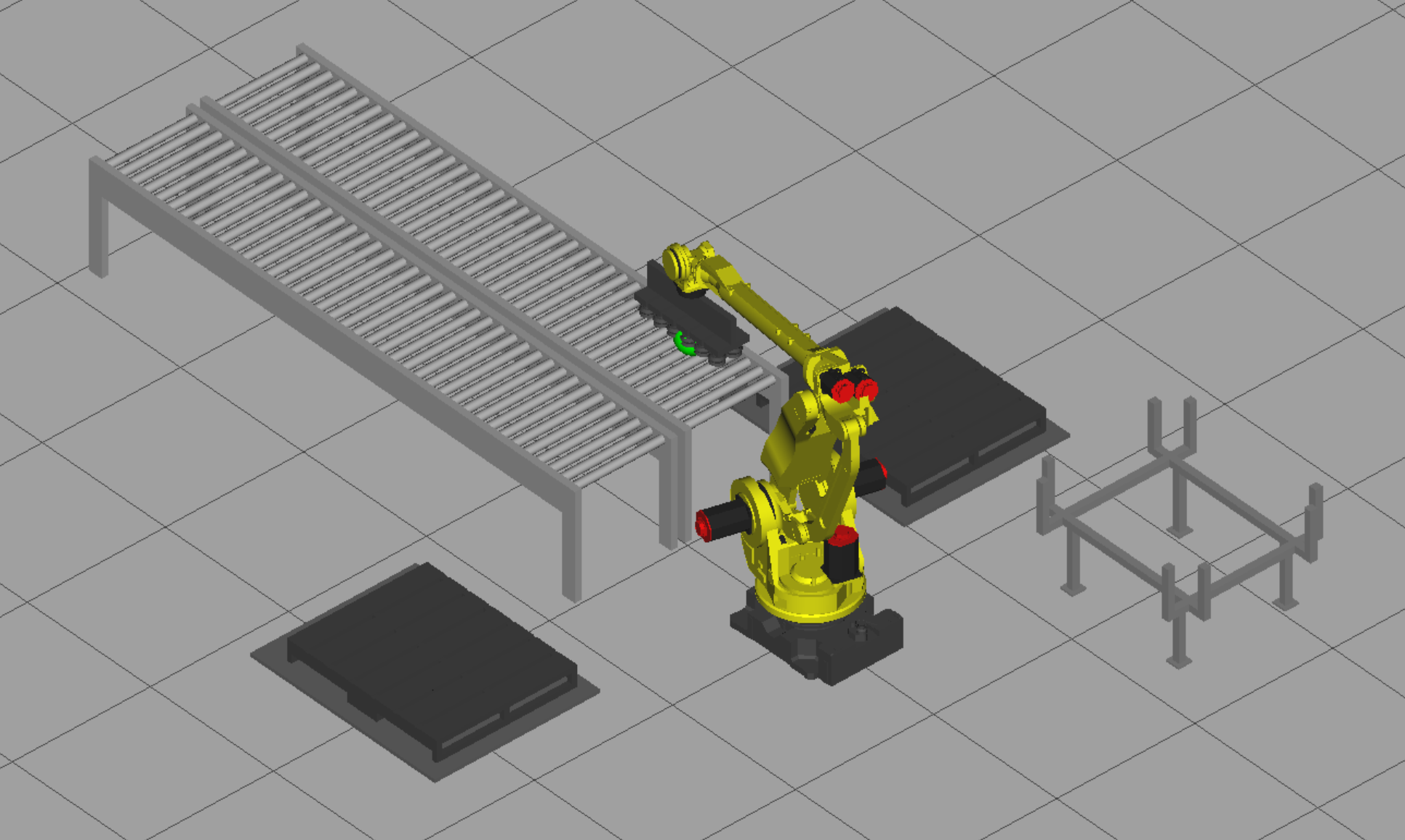
工装Fixtures的设置
与先前的搬运仿真不同,这次的Fixtures有一些其他的类型,本次案例涉及到的时货盘Pallet、传送带Infeed,在创建好码垛仿真后会默认一个Pallet1和一个Infeed1
货盘Pallet的位置设置
选择Pallet1,更改位置为(440,-2100,24,0,0,0),并锁定位置
再创建一个新的Pallet,命名为Pallet2,更改位置为(440,1300,24,0,0,0),并锁定位置,在Pallet的属性当中,选择”托板“选项卡,选择水平方向并应用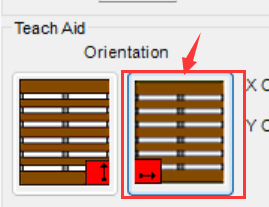
传送带Infeed的设置
选择Infeed1,更改位置为(1100,-700,750,0,0,0),锁定位置并应用,将延迟时间Transit Delay改为1000msec
创建Infeed2,更改位置为(1100,100,750,0,0,0),锁定位置并应用,点击”方向“选项卡调整最大货物数量为6,同样将延迟时间Transit Delay改为1000msec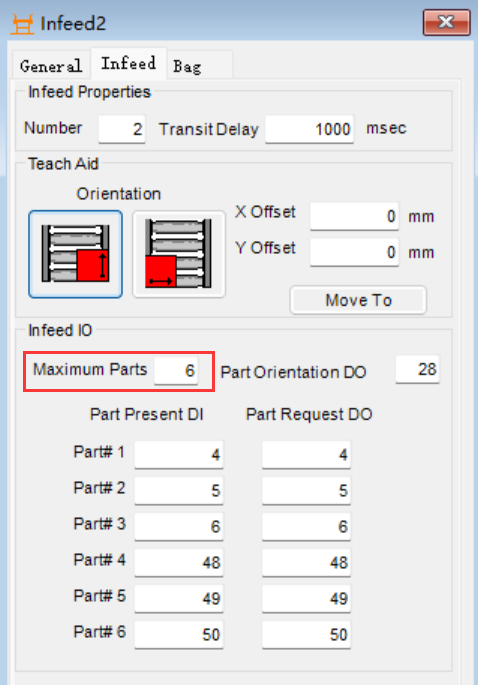
添加厚纸供给装置SlipSheetDispenser
Fixtures右键创建一个厚纸供给装置SlipSheetDispenser,更改位置为(-675,-1300,0,0,0,0),锁定位置并应用
码垛单元的设置
码垛单元就是码垛仿真当中需要进行搬运的东西
在Unit Loads下双击UL001进行设置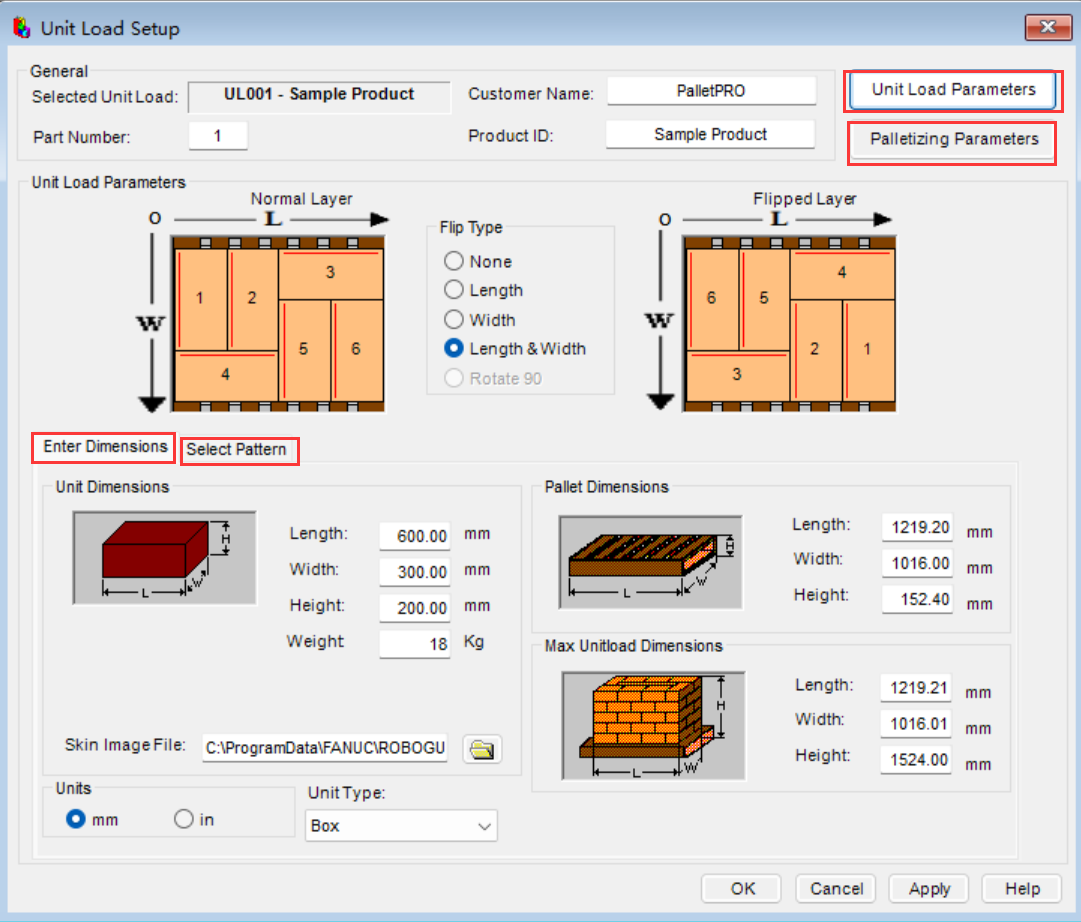
这个菜单分四个页面,UI做的不太好认清
先在尺寸输入下将宽度改为300,点到”选择模式“Select Patten选项卡将堆装模式选为最佳
点击码垛设置Palletizing Parameters,将码垛参数的层数改为3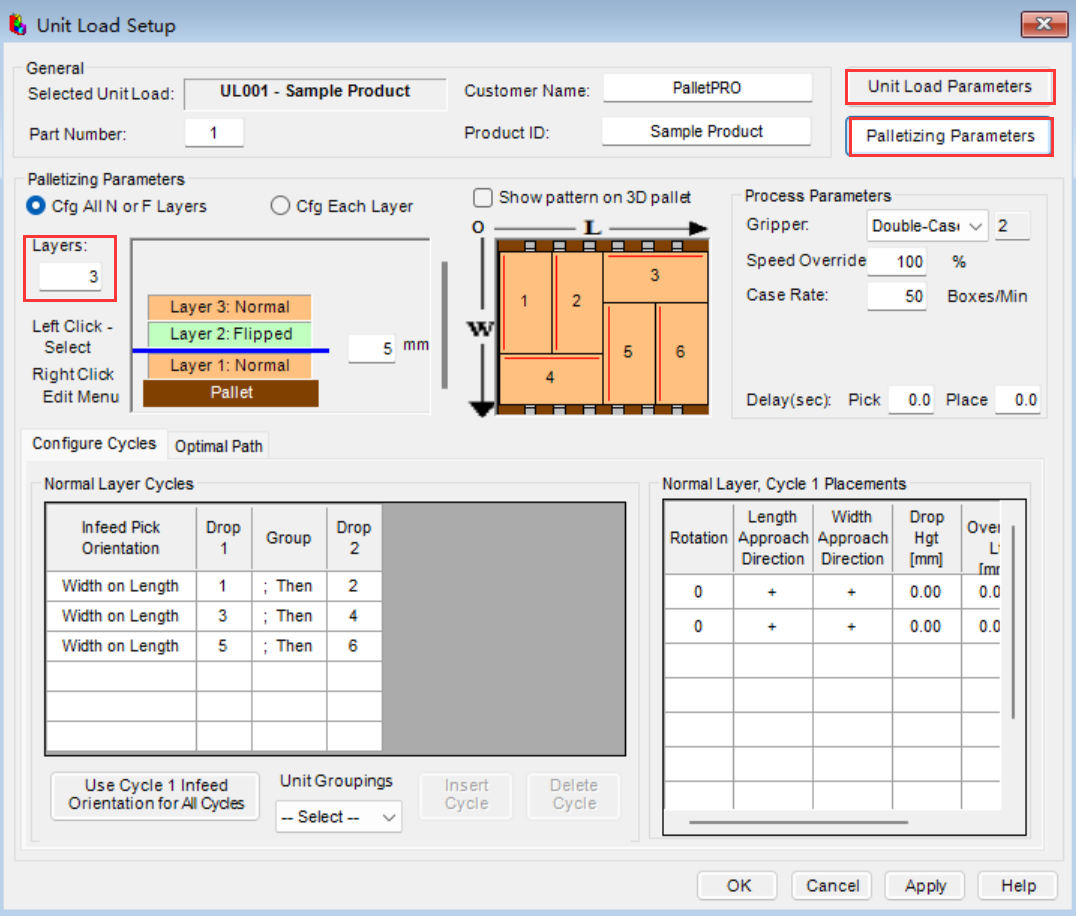
在层1 Layer1上右键点击在上方插入厚板
手爪Gripper改成双重Double-Case
然后再创建一个Unit Loads,在码垛设置Palletizing Parameters下改手爪为双重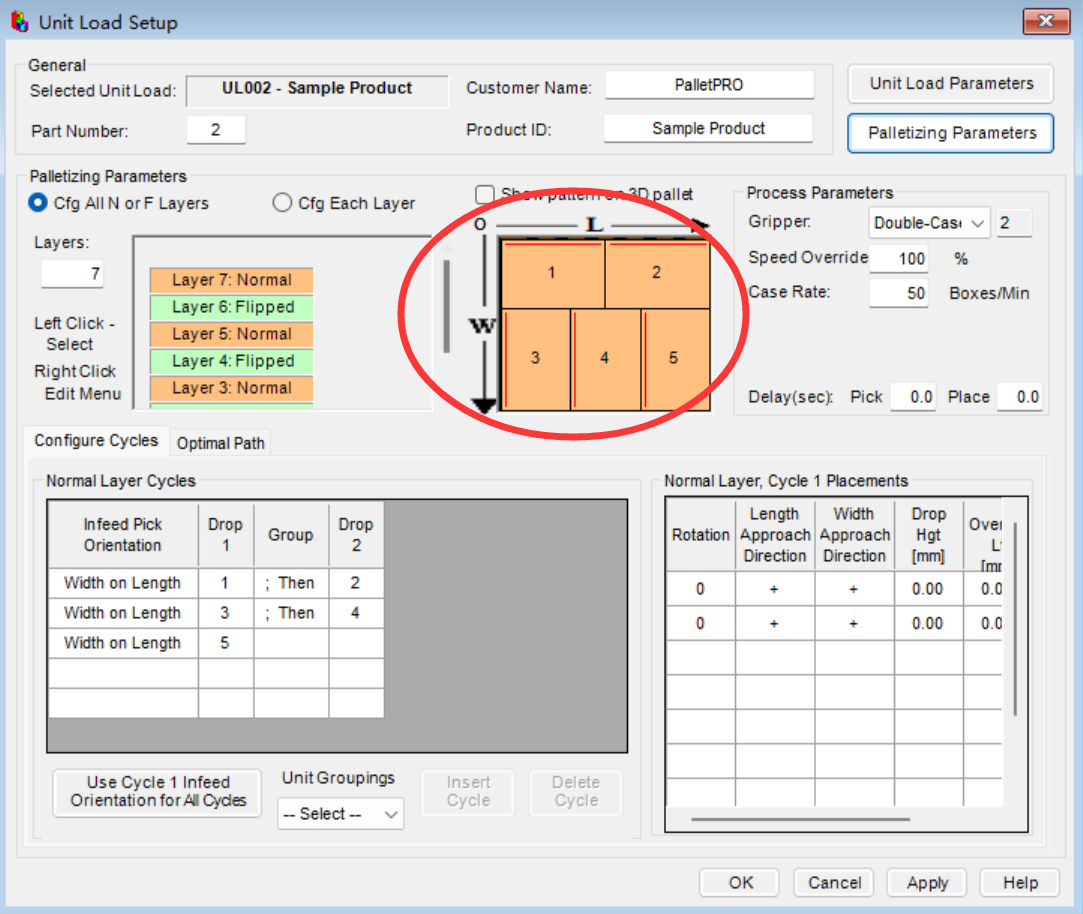
注意这个和之前那个不一样,这个是第二个Unit Loads
点击开始仿真
总结
码垛仿真
待解决的问题
码垛仿真的代码
这种码垛仿真对于实际工程当中的作用




