
机器人基础
#学习笔记 #机器人模块 #机器人理论
主要内容
机器人的基础知识
概述
机器人概述
- 1920年捷克作家Karel Capek科幻剧中的robota,农奴苦力,robot从这个衍生
- 机器人所具有的特性
- 一种机械电子装置
- 动作具有类似于人或其他生物体的功能
- 可通过编程执行多种工作,具有一定的通用性与灵活性
- 具有一定程度的智能,能够自主完成一些操作
- Jsaac Asimov的机器人学三原则
- 机器人不得伤害人或由于故障而使人遭受不幸
- 机器人必须服从于人的指令,除非这些指令与第一原则相矛盾
- 机器人必须能保护自己的生存,只要这种保护行为不与第一或第二原则相矛盾
机器人研究内容
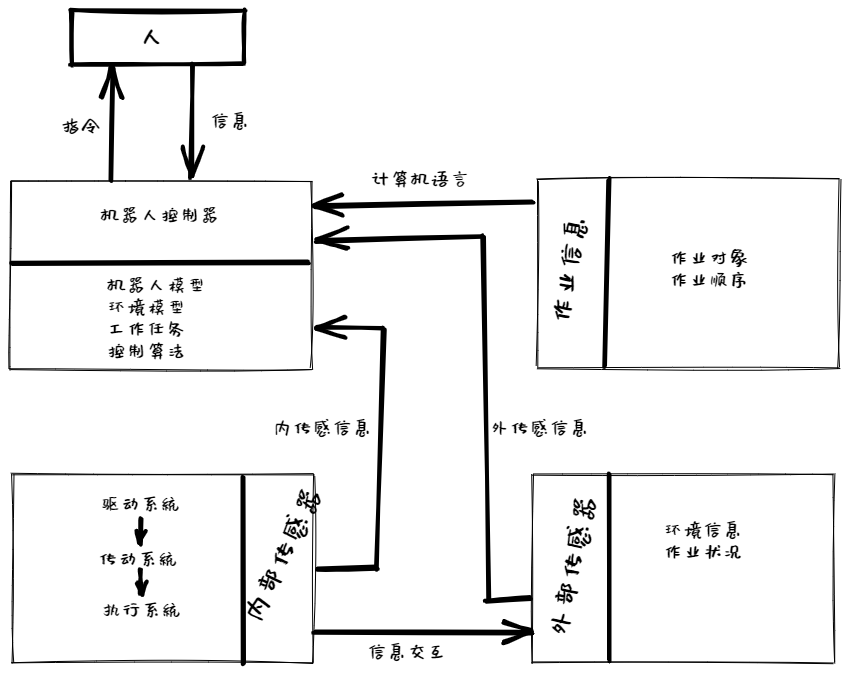
一个机器人系统的组成:
- 机械结构
- 机器人本体
- 传动机构
- 执行机构
- 控制器
- 对机器人模型、环境模型、工作任务和控制算法的分析与实现
- 实现人机交互
- 传感器,用来对机器人内部与外部的情况进行监控
- 内部传感器
- 外部传感器
- 驱动系统,机器人的动力源
- 气动
- 液压
- 电动
- 作业信息
- 实现对作业对象、作业顺序等信息的分析与处理
机器人是继承了机械工程学、计算机科学、控制工程、电子技术、传感器技术、人工智能、仿生学等学科为一体的综合技术,也是多学科交叉与多学科科技革命的必然结果
而每一个部分的研究内容
- 机械结构
- 机器人机构学、运动学、动力学
- 驱动与传动
- 驱动方式、驱动器性能和减速器等驱动、传动系统
- 传感器与感知系统
- 传感器技术、多传感器系统和传感器信息融合
- 传感数据采集、传输与处理
- 机器视觉技术
- 机器人建模与控制
- 控制理论
- 控制系统结构、模型和算法
- 多机器人协同控制
- 控制接口设计
- 机器人规划与调度
- 环境建模任务规划路径规划机器人导航机器人调度与协作
- 人工智能计算机科学
- 机器人当中的人工智能技术
- 人机接口人机交互机器人语言计算机网络并行处理大数据处理与云计算
![[image-20221202162442086.png]]
机器人技术发展趋势
以下几个方面:
- 机器人操作机构
- 设计机构提高机器人的负载-自重比
- 机器人控制技术
- 开放式模块化控制系统,驱控一体化
- 基于PC网络式控制器以及CAD/CAM/机器人编程一体化
- 多传感融合技术
- 人机共融技术
- 机器人网络通信技术
- 机器人网络通信与大数据、云计算以及物联网技术的结合
- 机器人遥操作和监控技术
- 提升高危区域的机器人操作
- 机器人虚拟现实技术
- 微纳机器人和微操作
- 多智能体协调控制
- 软体机器人




